")
") English (UK)
English (UK) ") Polski (PL)
Polski (PL) 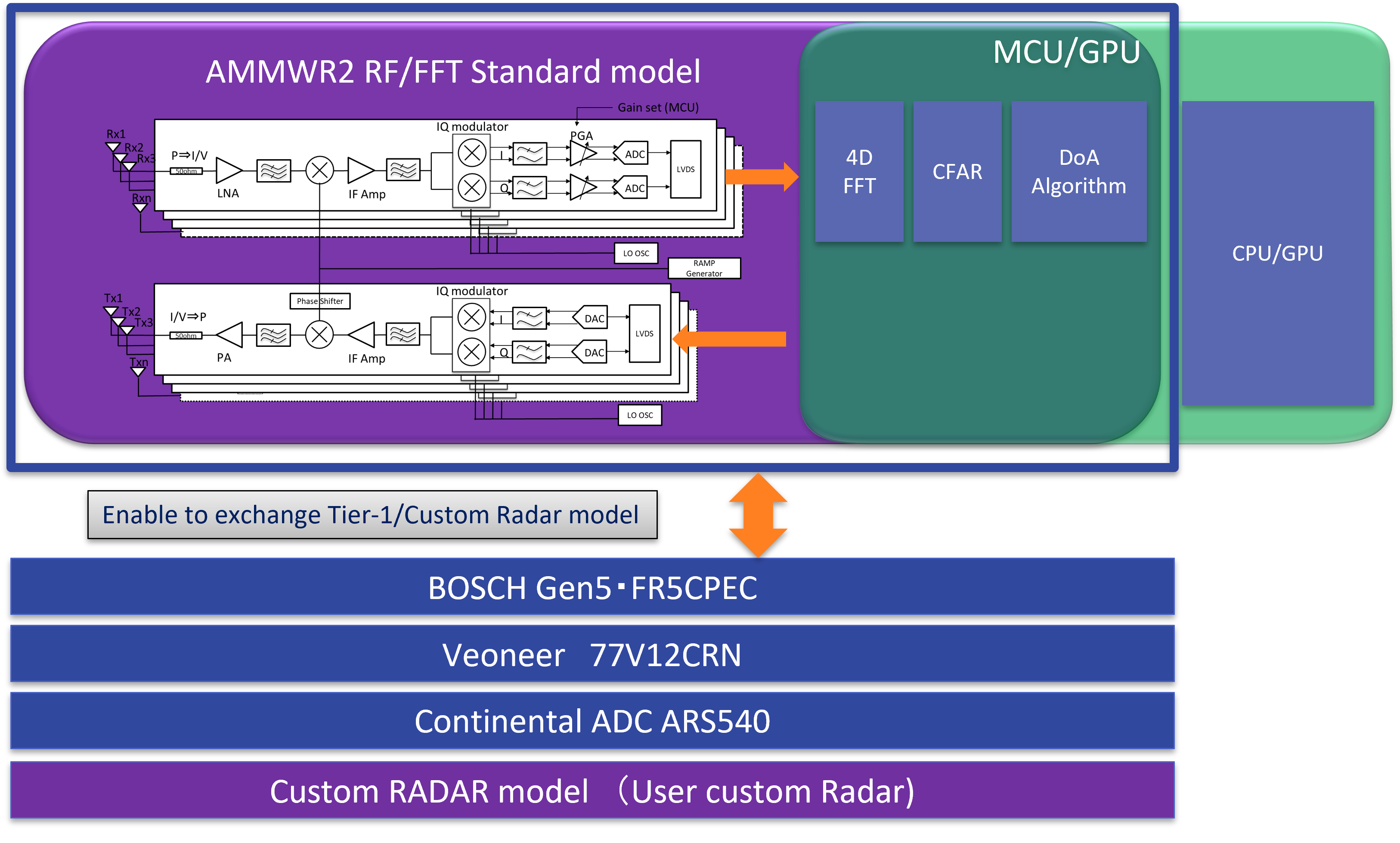
Superparallele Optimierung verbessert die Simulationsleistung um das 10-fache
OTSL Inc., ein Entwickler und Vertreiber von drahtlosen Kurzstreckensystemen und eingebetteten Systemen, hat einen neuen 3D-Echtzeit-Millimeterwellen-Radarsimulator für autonomes Fahren (*1), AMMWR2 (Advanced Millimeter Wave Radar Simulator 2), angekündigt. Seit der Markteinführung von AMMWR im Jahr 2017, der weltweit ersten Sensor-Simulator-Software für autonomes Fahren, die eine dynamische Echtzeitsimulation ermöglicht, hat OTSL weiter intensiv in die Entwicklung investiert. Mit der Ankündigung des AMMWR2 hat OTSL die bei dieser Entwicklung erzielten Funktions- und Leistungssprünge manifestiert. Dieses Produkt soll bis Ende dieses Jahres weltweit an Automobilhersteller, Systemlieferanten, die Fahrzeugsensoren entwickeln, konstruieren und produzieren, sowie an Halbleiterhersteller, die Sensorgeräte entwickeln, vermarktet werden.
„Mit den weltweiten Fortschritten bei der Anwendung des autonomen Fahrens wachsen die Erwartungen an eine fortschrittliche Simulationstechnologie, die in der Lage ist, alle Arten von Fahrbedingungen virtuell zu reproduzieren und die Sicherheit und Genauigkeit zu überprüfen und zu validieren. Das derzeitige autonom fahrende Fahrzeug verfügt jedoch nur über Level 2- oder Level 3-Funktionen gemäß den SAE International Standards", so Shoji Hatano, CEO, OTSL und OTSL Germany GmbH. „Um das vollständig autonome Fahren durch Systemüberwachung, Stufe 5 der Normen, zu erreichen, ist es unerlässlich, die Simulation möglicher Unfälle durch Defekte elektronischer Geräte und Sensorausfälle einzubeziehen. AMMWR2, der am 17. Juni angekündigt wurde, ist der einzige Millimeterwellen-Radarsensor-Simulator, der von der Ebene der elektronischen Geräte, einschließlich Halbleitern und Sensoren, bis hin zum Bereich der Simulation des autonomen Fahrens (AD) und fortschrittlicher Fahrerassistenzsysteme (ADAS) reicht."
AMMWR2 verwendet die Ray-Tracing-Methode (*2), die im Bereich der optischen Simulation und der einzigartigen Reflexions- und Beugungsmodelle zum Einsatz kommt. Dabei wird eine spezielle dreidimensionale computergenerierte Karte der Unreal Engine 4 (EPIC Games, Inc.) verwendet, die Reflexions- und Beugungsmodelle von Straßen, Straßenbäumen, Straßenlaternen, Verkehrssignalen, Schildern und anderen Objekten implementiert, um eine Echtzeitsimulation dynamischer Objekte zu erreichen. Die Entwicklung origineller Messmethoden und die Erstellung von Reflexionsmodellen aus den durch die Messung gewonnenen Daten ermöglicht eine genaue Simulation der Reflexion von Radarwellen, wobei sogar die Formen und Materialien von Fahrzeugen, Fußgängern, Verkehrssignalen, Schildern und anderen Objekten berücksichtigt werden. Durch die verstärkte Partnerschaft mit COSIDE (R) (*3), einem SystemC AMS Entwurfs- und Simulationswerkzeug der COSEDA Technologies GmbH für Halbleiter, das den Entwurf vom Schaltkreisentwurf bis zur Systementwurfsebene unterstützt, kann eine Umgebung geschaffen werden, in der die Simulation vollständig in Software durchgeführt werden kann, ohne dass irgendeine Hardware, wie z. B. Sensoren oder elektronische Steuergeräte (ECUs), oder sogar das Fahrzeug selbst benötigt wird.
AMMWR2 bietet die folgende wichtige Aktualisierung. Diese Leistungs- und Funktionsverbesserungen werden den Herstellern, die an autonomen Fahrtechnologien arbeiten, kürzere Entwicklungs- und Testvorlaufzeiten ermöglichen.
Beschleunigung der Simulationsengine durch interne Codeoptimierung und superparallele Verarbeitungstechniken. Dies hat die Leistung von Simulationen mit Raytracing um einen Faktor 10 oder mehr verbessert.
Durch die Stärkung der Partnerschaft mit der COSEDA Technologies GmbH, die das SystemC AMS Design- und Simulationswerkzeug COSIDE (R) entwickelt, können verschiedene Radargeräte als benutzerdefinierte Modelle verwendet werden, zusätzlich zu den einzigartigen Radarmodellen, die auf Kfz-Radargeräten basieren, die Tier-1 mit OEM liefert, einschließlich des FR5CPEC von Bosch und des ARS540 von Continental.
AMMWR2 unterstützt jetzt die Integration mit dem Open-Source-Simulator CARLA, der weithin für die Entwicklung und das Testen von Algorithmen für autonomes Fahren verwendet wird.
www.otsl.jp






